时间:2021-03-26 来源:数字化企业网——eworks
作者:张勇 殷承良 熊伟威
人们提出了一个全新的车辆电子稳定控制系统——ESP,这个系统就是我们所说的汽车稳定控制系统,该系统在一定情况下能够主动对汽车进行干预的控制系统,以防止汽车侧滑(打转)的出现,及时帮助驾驶员控制车辆,避免车祸的发生。
随着经济飞速发展、汽车拥有量快速增长、道路交通密度越来越大,交通事故也越来越多。多数交通事故是因紧急换道时车速过高或地面打滑导致车辆侧向失稳所造成的。因此,人们提出了一个全新的车辆电子稳定控制系统——ESP,这个系统就是我们所说的汽车稳定控制系统,该系统在一定情况下能够主动对汽车进行干预的控制系统,以防止汽车侧滑(打转)的出现,及时帮助驾驶员控制车辆,避免车祸的发生。
由于车辆电子稳定性控制系统通常是在车辆处于极限工况下工作的,因此对车辆稳定性控制研究需要在特定的危险工况洳冰雪路面、高速连续弯道等)下进行反复试验才能找出车辆失稳的特征,然后制定相应的控制策略并开发电子控制系统进行控制。另外,在极限工况下驾驶员的驾驶行为对汽车运行状态以及车辆稳定性控制起着至关重要的作用。尽管随着计算机技术的飞速发展,很多动力学仿真软件在汽车动力学研究领域得到广泛的应用,但是有一个难题始终无法解决,即仿真过程中驾驶员只能用驾驶员模型,不能将人的驾驶行为实时介入仿真系统。随着虚拟现实技术的发展,通过人体视觉将人的动作行为介入到仿真系统软件应运而生。利用虚拟现实技术,将人作为一个仿真系统的一部分嵌入到实时仿真过程中来实现交互式车辆动力学仿真,是在实验室环境下研究车辆操纵稳定性主观评价以及车辆动力学控制研究的重要手段。
尽管,国内外出现了一些用于汽车专业实时虚拟现实仿真软件或仿真系统,但所采用的开发方案非常复杂,而且开发成本及其昂贵,如吉林工业大学的汽车动态模拟试验台耗资千万,如果购买一套汽车专业实时虚拟现实仿真系统如dSPACE Simulator系统,也需要耗资几百万,非一般科学研究单位所能承受的。因此探讨一种廉价的交互式硬件在环车辆动力学控制仿真方案上是很有意义的。
虚拟现实(简称VR-virtual reality)系统是利用计算机技术创建一个酷似客观环境又超越客观时空的人机环境,使人能得到真实的体验并进行人机交互的系统。将虚拟现实技术引入到工程物理试验中,可以方便地在计算机上产生一个虚拟的试验环境,在仿真过程中工程人员可以通过虚拟环境直观观察或参与试验过程。目前用于虚拟现实开发的软件系统很多,如multigen,3Dmax,但是可以支持实时虚拟现实系统开发的软件很少,特别是将虚拟现实系统与其他数学仿真模块相结合的应用软件更是屈指可数,但是Mathworks公司的Matlab/simulink成功地做到了这一点,该交互式汽车动力学硬件在环仿真平台便是在matlab xPCTarget与虚拟现实技术综合应用的基础上实现的。这种方案实现简单价格低廉,且可以直接使用以往的Matlab汽车动力学模型,节省人力物力。
1 仿真系统配置
如图1所示,该仿真系统由驾驶员、物理硬件、传感器以及3台计算机构成。整个仿真系统可以分成5个层次,即系统操纵控制、虚拟现实、实时系统以及硬件接口、驱动电路与传感器以及液压执行机构与操纵机构等,仿真系统层次配置如图2所示。
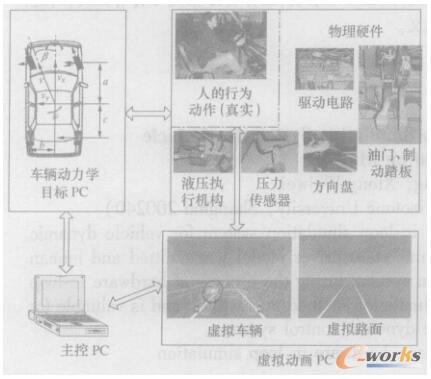
图1 仿真硬件平台配置
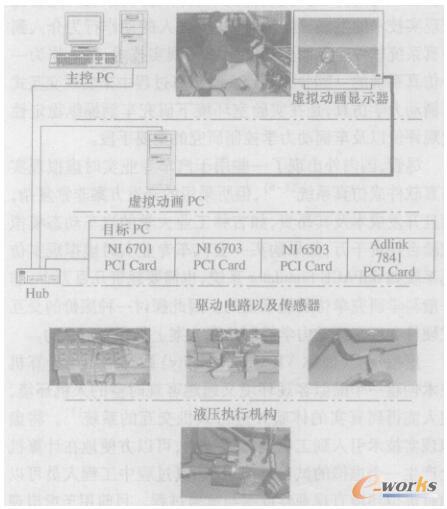
图2 仿真系统层次配置方案
利用实时仿真硬件接口技术,在仿真系统中嵌入ESP制动液压管路和液压执行机构,以代替车辆模型中相应的软件模块。执行机构选用BOCH 5.3电磁液压阀,制动液压管路采用的是ESP试验台架上的制动部件,在液压管路上接入压力传感器用来采集ESP工作过程中4个制动轮缸和主缸的压力信号。驾驶员的动作通过主缸压力传感器、油门踏板传感器以及方向盘转角传感器采集到实时系统中参与车辆动力学模型的计算,同时根据实时动力学模型的仿真结果可以计算出仿真车辆在虚拟环境的空间位置,然后借用虚拟现实技术通过计算机显示出来,驾驶员根据虚拟场景中汽车运行状态并利用方向盘、油门踏板和制动踏板对仿真车辆进行实时交互式的控制,从而达到了交互式硬件在环仿真的目的。
仿真系统中3台PC,各自功能如下:
(1)主控机(Host PC)
利用Matlab RTW将车辆动力学、ESP控制逻辑的Simulink模型,编译成实时代码并下载至目标机;控制目标计算机的运行;通过xPC API接口将仿真结果实时读取并驱动虚拟现实模型运行。
(2)目标机(Target PC)
运行动力学以及控制模型的实时代码:通过安装在目标机上的PCI数据采集控制卡模拟机数字板卡采集传感器数据和发出控制信号;将用户关心的仿真结果存储到目标机硬盘上,待仿真结束后由用户通过xPCTarget Ftp接口传到主控机供用户分析;通过网络与主控机进行通讯。
(3)虚拟动画PC(Animation PC)
运行汽车和环境VRML模型;通过网络接收主控机传输过来的车辆三维位置、方向盘转角、转向轮转角等信号驱动虚拟世界相应虚拟物体的运动。
另外接入仿真系统的实物包括:
(1)液压管路系统,包括真空助力、油门控制机构、制动主缸和轮缸等。
(2)液压执行机构。
(3)液压阀驱动电路。
(4)真实方向盘。
该仿真系统的硬件接口由NI公司的数控采集卡NI6071E、NI6503以及凌华的PCI7841 CAN卡组成。这些接口卡分别用于采集传感器信号、发出控制信号以及共享给其他系统需要的数字和模拟信号。传感器包括油压传感器、油门踏板、方向盘转角等。
系统实时仿真模型是完全基于Simulink的,主要包括车辆动力学、ESP控制逻辑、制动器模型和轮胎模型。虚拟现实同步视景的实现是基于VRML(Virtual Reality Modeling Language)语言实现的,VRML能够创建3D的车辆和环境实体动态模型如图3所示。通过人体视觉使实验者能够体会到逼真的驾驶感觉,如果采用力反馈模拟方向盘,驾驶员还能够获得“路感”。这样在仿真试验过程中可以直接通过驾驶员的直观感觉对试验进行主观评价。仿真系统中各计算机的运行要求和环境如图4所示。
图3 虚拟车辆及环境模型
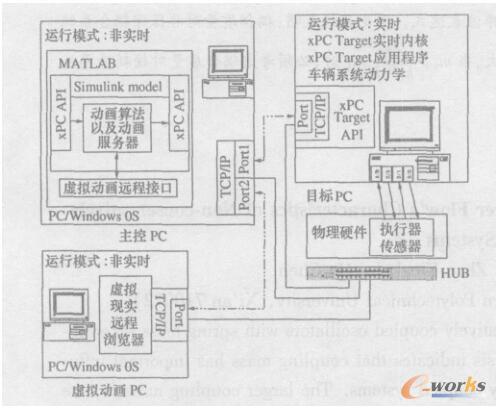
图4 仿真系统中各计算机的运行要求和环境
2 试验测试评估
2.1 操稳实车试验数据与仿真试验数据对比
为了验证该方案的可行性,按照如图5所示的双移线尺寸,将某款汽车在真实环境下的试验结果与其在虚拟环境下的测试结果进行对比分析,试验测试和仿真路面为水泥路面(附着系数为0.9)。如图6所示的对比分析表明,试验过程中驾驶员的动作以及车辆响应基本相似。因此,该仿真方案可以用于交互式车辆操稳硬件在环仿真研究。
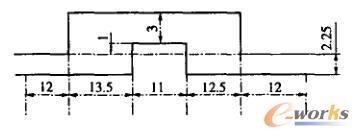
图5 双移线尺寸图(单位:mm)
2.2 有无ESP控制动力学仿真对比分析
为了进一步验证仿真方案在车辆动力学控制研究中应用的可行性,本文将有ESP控制和没有ESP控制的仿真进行对比。在附着系数为0.3的路面上进行如图5所示的双移线仿真试验,试验结果如图7所示。车速为40km/h时,有ESP控制的横摆角速度(yawrate)和侧偏角(side slip angle)都在稳定区,即此时车辆动力系统是稳定的,而没有ESP控制的横摆角速度和侧偏角在车速为35km/h时便进入非稳定区(注:该仿真结果与实际情况相符合,在路面系数为0.3左右进行如图5所示的双移线试验,当车速达到35km/h时车辆便不可控),即此时车辆动力系统是失稳的。
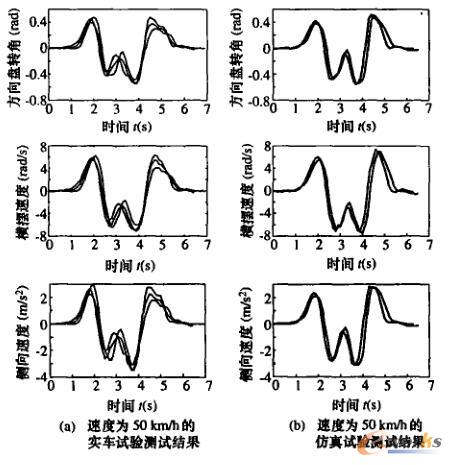
图6 实车试验车辆双移线试验响应以及驾员动作与仿真试验对比
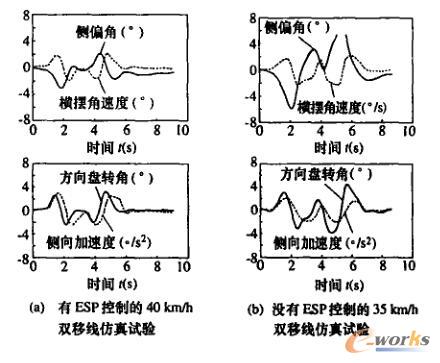
图7 有无ESP控制的双移线仿真试验响应以及驾驶员动作对比
3 结论
本文提出了一种简单经济的交互式车辆动力学硬件在环仿真系统。该系统是利用虚拟现实技术将人嵌入到仿真系统中,从而避免了在车辆动力学控制仿真研究过程中建立复杂不确定的驾驶员模型,同时该仿真系统的程序开发完全基于模型语言(Simulink和VRML)的,因此开发过程非常简单。系统仿真试验结果表明,该系统不仅可以用于车辆操稳性能主观评价研究,而且可以用于车辆动力学控制硬件在环仿真研究。由于该仿真系统的实时硬件接口非常丰富且具有可扩展性,因此该仿真系统可进一步用于车辆动力学控制系统快速开发。
点赞人: 庄SIR 杨心怡 王王木木