时间:2021-01-24 来源:e-works数字化企业网
为了保证提升机调速系统能够具备高控制精度、动态响应速度快、可靠性高、鲁棒性强等良好的运行性能,本文针对矿井提升机调速系统提出一种自抗扰控制(ADRC)方案。
矿井提升机是矿山运输系统中的主要设备之一,主要用于矿井提升矿石或人员、材料。在煤矿生产中,矿井提升机起着非常重要的作用。提升机调速控制系统的控制性能,既直接影响矿山生产的效率及安全,又代表着矿井提升机发展的整体水平,是矿井安全生产中重中之重的一大环节。矿井提升机调速控制系统具有强非线性、环节多、控制复杂、运行速度快、惯性质量大、运行特性复杂的特点,其控制效果的好坏在很大程度上决定了提升机是否能够安全可靠运行,避免严重的机械磨损,防止较大的机械冲击,减少机械部分维修的工作量,延长提升机械的使用寿命。目前,提升机的调速系统多采用传统PID控制,但是其非线性及时变性问题很突出,随着转速、负载及其他运动条件的变化,模型参数将会发生大的变化,易造成系统的不稳定。因此,为了保证提升机调速系统能够具备高控制精度、动态响应速度快、可靠性高、鲁棒性强等良好的运行性能,本文针对矿井提升机调速系统提出一种自抗扰控制(ADRC)方案。
1 AIDRC控制原理
ADRC控制技术是一种非线性鲁棒控制技术,它是建立在经典控制理论与现代控制理论相结合的基础上,不依赖于系统的精确模型。ADRC控制器通常由跟踪微分器(tracking diferentiator,TD)、扩张状态观测器(extended state observer,ESO)和非线性误差反馈控制律(non-linear state error feedback,NLSEF)3个基本部分组成,其中,TD主要为提取微分信号提供过渡过程,解决PID控制中“超调”与“快速”的矛盾,消除噪声;ESO则用于对系统总扰动进行估计,将被控对象模型中的未知部分和未知干扰都认为是系统的总扰动,然后通过NLSEF以前馈的形式进行补偿;NLSEF的作用是采用非线性配置的方式对被控对象的内扰和外扰进行自动补偿。从上述描述可以看出,ADRC控制技术不但继承了经典控制方法的优点,同时涵盖了非线性控制的思想。对于强非线性、不确定时滞的复杂系统具有可靠的控制品质。
2 矿井提升机调速系统的ADRC控制
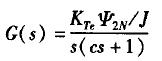
矿井提升机运行速度的控制其实质为异步电动机转速的控制。三相交流异步电动机的数学模型是一个高阶、非线性、强耦合的多变量系统。图1为化简后的异步电动机开环模型:


图1 异步电动机开环模型
图1中,KTe=nPLM/LR,nP为磁极对数,LM为互感,LR为转子自感;c=1/Kr,KT=1/2τΣi,τΣi=Ts/2+τoi,τoi为电流滤波器的时间常数,1/(cs+1)为忽略二次项的电流闭环传递函数,由此可得,异步电动机开环传递函数为:
对于ADRC控制技术来说,目前理论上对一、二阶的ADRC控制器的研究最为成熟,从式1可以看出,异步电动机转速控制系统是一个二阶系统,因此本文采用二阶ADRC控制器。图2为矿井提升机调速系统的ADRC控制方框图。
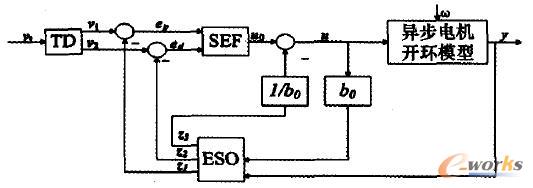
图2 矿井提升机调速系统的ADRC控制方框图
为满足系统快速、简单、实用的要求,采用线性函数实现TD,其描述形式为:

式中,vo是TD的输入信号,为设定值;v1、v2分别是TD的两个输出信号,v1为输入信号的跟踪信号,v2为v1的微分信号;r0为快速因子;h为采样周期;fhan(·)为最优综合控制函数。
ESO是依据控制量及输出量构造出来的,其主要目的是为了观测系统的各个状态和未知扰动,其描述形式为:
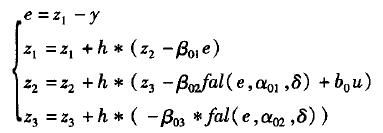
式中,β01-03为ESO的可调增益参数;b0为补偿因子;0<α01-03<1,δ>0,,均为可调参数,fal(·)为ADRC中常用的非线性函数,用于ESO的函数构造。
在ADRC控制中,控制量的行程依赖于NLSEF,其描述形式为:
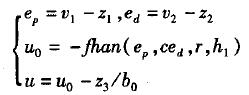
式中,c在反馈中起阻尼作用,为阻尼因子;r为控制量增益;h1为精度因子,决定跟踪设定值的跟踪精度。
3 试验与仿真
根据文献,本文在MATLAB/Simulink仿真平台中搭建出二阶非线性ADRC控制器仿真模型,其子系统模型及封装图形如图3所示:
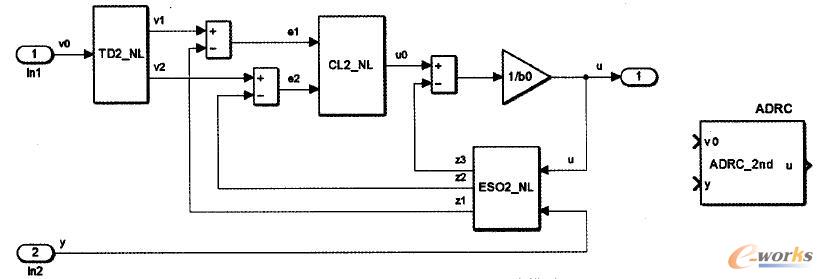
图3 二阶非线性ADRC控制器仿真模型
选用250kW/0.69kV的异步电机拖动提升机,其额定相电流Ia=219A,额定转子磁通,Ψ2N=11.34Wb,磁极对数np=6,互感LM=0.231mH,转子自感LR=0.257mH,转子与负载总转动惯量J=215kg·m2,τoi=0.010s,TS=0.002s。根据异步电动机开环模型,建立矿井提升机调速系统的ADRC
控制仿真模型如图4所示,其中ADRC模块的参数设置为:TD参数r0=28,h=0.01;ESO参数α1=0.4,α2=0.34,δ=0.01,β01=4,β02=13,β03=72,b0=1;SEF参数:c=7,r=11,h1=0.O1。
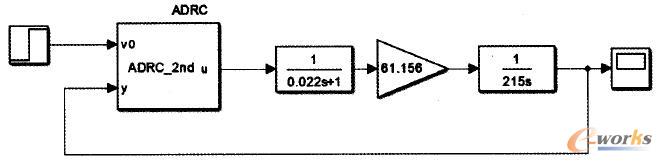
图4 矿井提升机调速系统的ADRC控制仿真模型
仿真输入为单位阶跃函数,通过仿真运行,可得到响应曲线如图5所示。系统能否快速响应,及时调整提升机运行速度,对于提升机的安全运行、运输效率具有直接影响,是衡量矿井提升机调速系统控制效果的一个重要标准。系统超调量越低,响应时间越短,矿井提升机调速控制系统的运行也就越稳定。图5中的两条曲线分别为传统PID控制和ADRC控制下调速系统的阶跃响应曲线。传统PID控制的单位阶跃响应的最大超调量相对较高,在30%左右,响应速度较慢,系统大约在18秒左右趋于稳定;而ADRC控制的单位阶跃响应则无超调量,系统响应速度快,大约在2秒时稳定。从两种控制方式的阶跃响应曲线可以明显看出,矿井提升机调速系统在ADRC控制下具有很好的控制效果。
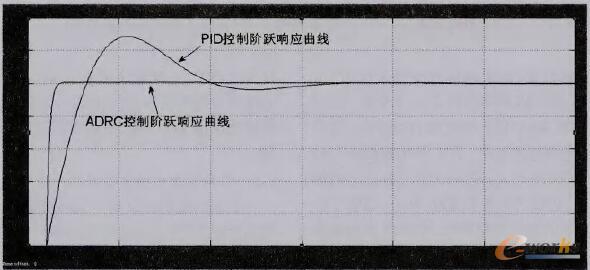
图5 矿井提升机调速系统阶跃响应曲线
由于矿井提升机调速系统需随设定好的速度给定值运行,使得系统的跟踪性能显得非常重要。因此本文进行了调速系统跟踪仿真试验。将输入信号设置为幅值为3的方波信号,并在26秒的时候施加一个幅值为1、持续时间为0.5秒的干扰信号,其仿真结果如图6所示。
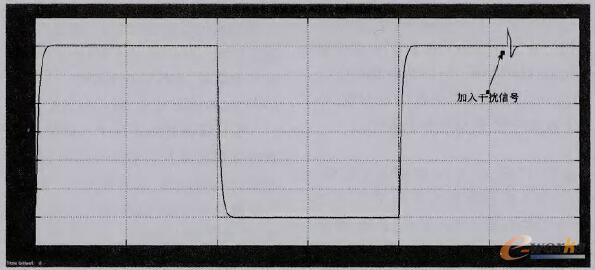
图6 矿井提升机调速系统ADRC控制跟方波跟踪响应曲线
从图6中可以看出,ADRC控制下的调速系统对设定值的跟踪速度快,反应灵敏,不存在超调量,可以快速达到稳定状态,同时对施加的干扰信号具有较强的抑制能力,体现出良好的控制品质。
4 总结
矿井提升机调速系统的控制效果对于煤矿工业的生产效率、安全运行有着重要的研究意义。本文结合调速系统的特点,根据ADRC控制的基本原理,结合其兼顾现代控制理论与传统经典控制理论的优势,构造调速系统的ADRC控制结构,并借助MATLAB/SIMULINK平台,搭建出仿真模型。通过仿真验证,所设计的矿井提升机ADRC调速控制系统能实现无超调跟踪、快速响应、强抗扰能力等控制目的,与传统PID控制相比,具有良好的控制效果。
本文来源于互联网,麦涛网本着传播知识、有益学习和研究的目的进行的转载,为网友免费提供,并已尽力标明作者与出处,如有著作权人或出版方提出异议,本站将立即删除。如果您对文章转载有任何疑问请告知我们,以便我们及时纠正。联系方式:office@maitaonet.com tel:0731-89579179