时间:2021-12-14 来源:转载于:作者:熊库辛
做仿真分析时,从结构设计工程师处拿到需求,第一步要做的不是划分网格,而是对物理现象进行分析,确定合适的分析类型,线性or非线性,静力学or动力学问题,用显式算法还是用隐式算法。
刚接触有限元
下面来看看结构力学仿真中常用的分析类型。
1、结构力学仿真常用分析类型
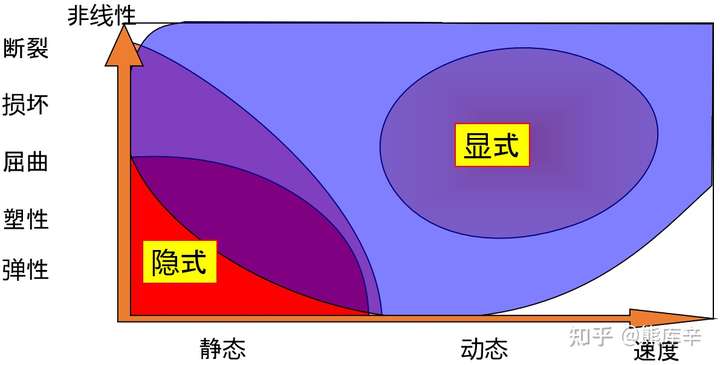
常见的结构力学分析类型如下图所示,主要有三个分类标准:线性/非线性,静力学/动力学,显式/隐式。
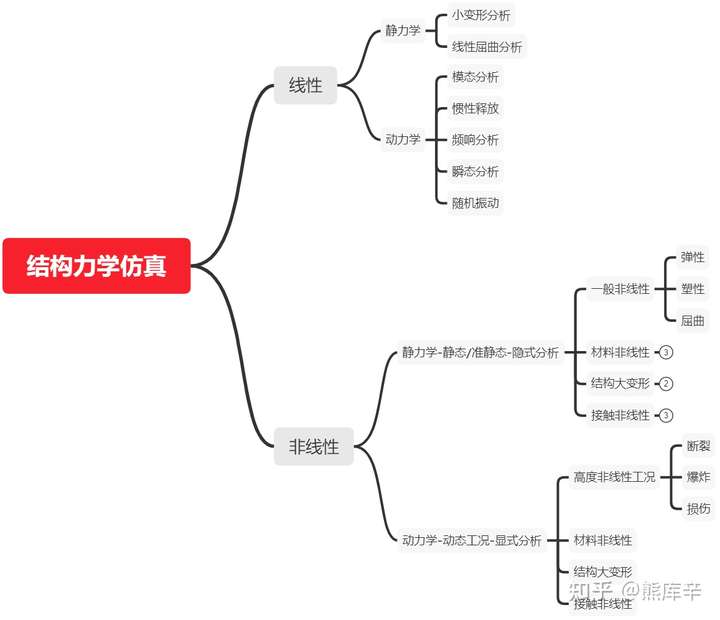
先说结论,结构力学仿真可通过以下三个问题初步确定分析类型:
- 线性工况还是非线性工况?
- 静力学问题还是动力学问题?
- 显式分析还是隐式分析?
2、如何区分线性工况和非线性工况?
2.1 线性工况
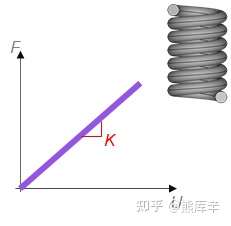
平衡方程F = [K] {U}中,刚度 [K]一直是常数,激励和响应呈线性关系。线性工况的分析结果可以叠加。例如:力F1导致变形u1,力F2导致变形u2,力F1+F2导致的总变形为u1+u2。
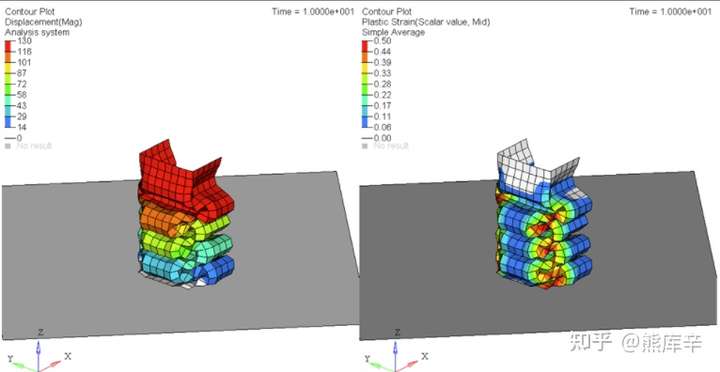
2.2 非线性工况
平衡方程F = [K] {U}中,刚度 [K]在分析过程中是变化的,激励和响应呈非线性关系。非线性工况的结果不能叠加。
三种常见非线性,非线性材料,结构大变形和非线性接触如何导致刚度发生变化呢?
- 非线性材料:如弹塑性材料,进入屈服阶段后,应力应变不再是线性关系,应力应变曲线斜率杨氏模量随着结构变形发生变化,从而导致平衡方程F = [K] {U}中的K发生变化。
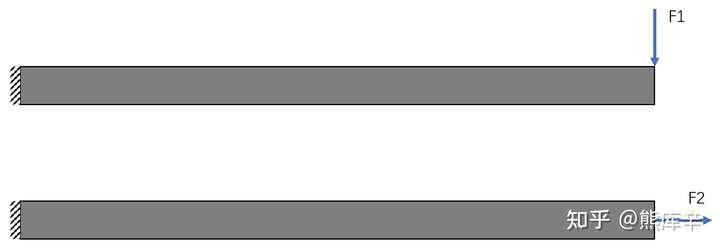
- 结构大变形:同一个结构,一般来说不同方向的刚度不一样,如下图所示的悬臂梁,产生弯曲变形的曲线F1-U1的斜率和拉压变形的曲线F2-U2的斜率大概率不一样;弯曲对应竖直方向变形,拉压对应水平方向变形,假如取中间值,倾斜45度方向变形,其力-位移曲线自然也不一样;相同的道理,结构受力F1发生大变形后,其弯曲方向的刚度自然会发生变化。因此结构发生大变形时,其刚度K会发生变化。
非线性接触:按接触的两个部件是否会产生相对运动,接触可分为两种类型:线性接触和非线性接触;若两个接触的部件不会产生相对运动,相当于两个部件结为一体,可直接使用绑定接触连接两个部件,此时为线性接触;若接触的两个部件会发生相对运动,则接触的位置会发生变化,导致平衡方程F = [K] {U}中的K发生变化。
如果本身是非线性工况,但使用线性工况进行模拟,结果会怎么样呢?
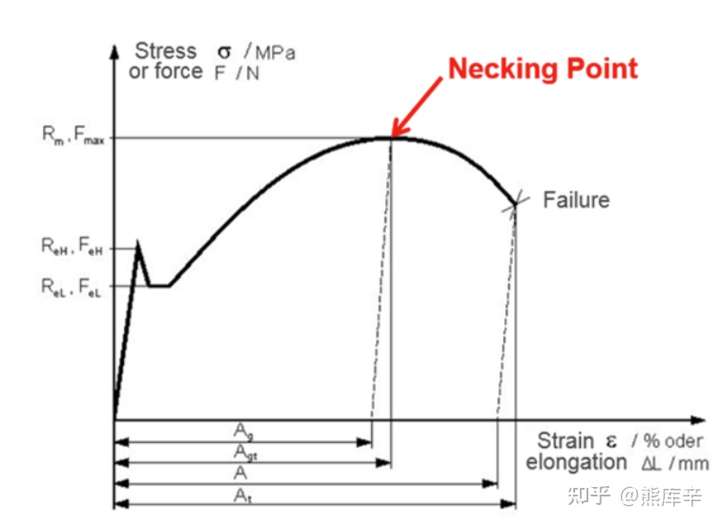
钢材的工程应力-应变曲线如下图所示,当材料超过屈服点后,应力-应变曲线斜率降低,即杨氏模量
3、如何区别静力学问题和动力学问题?
3.1 静力学问题
忽略惯性效应(惯性力
可模拟静态问题和准静态问题,比如静止不动的产品,发生匀速直线运动

3.2 动力学问题
惯性效应(惯性力)对结果影响很大,时间历程对结果有影响,需要使用方程 进行描述;
可模拟各种运动现象,包括准静态运动;如手机跌落、汽车碰撞,共振问题。

如果本来是动力学问题,比如存在一定程度的共振,而用静力学方法进行模拟,其结果会怎样呢?
存在共振时,即使很小的激励也会导致结构发生较大的变形,若使用静力学方法进行模拟,仿真结果的位移应力和应变都会显著小于实际结果。
4、用显式分析还是隐式分析?
假如已经确定是非线性的动态工况,用显式分析还是隐式分析呢?
先来看看显式算法和隐式算法区别。
4.1 显式算法
可用简单方程X(n)=X(n-1)+f(X(n-1))进行表示,由前一时刻的状态量X(n-1), 可以直接计算出下一步的状态量X(n),不需要联立方程组
显式求解器中常用的非线性有限元算法是中心差分法。
4.2 隐式算法
可用简单方程X(n)=X(n-1)+f(X(n))进行表示,无法直接根据前一步的状态量X(n-1)求得当前状态量X(n),需要先联立方程组,求逆矩阵,因此对内存要求高,并行效率不如显式算法高。可能不收敛,但相对显式算法来说,精度相对显式算法高。
隐式求解器中常用的非线性有限元算法是牛顿下山法。
由下图可知,显式和隐式并没有明确的分界线,在某些情况下,如准静态工况,既可以用显式算法进行求解,又可以用隐式算法进行求解;但总体来说,速度快且高度非线性问题用显式算法,如汽车碰撞问题;低速且非线性不太强的问题用隐式算法,如弹性或弹塑性问题。
再说一遍结论,结构力学仿真可通过以下三个问题初步确定分析类型:
- 线性工况还是非线性工况?
- 静力学问题还是动力学问题?
- 显式分析方法还是隐式分析方法?
来源:转载于:作者:熊库辛
回复: