时间:2021-08-30 来源:数字化企业网
0 引言
船舶的操作性能决定了船舶航行的安全性和稳定性,良好的船舶航向控制可以大大提高船舶的操纵性能。由于船舶在海上航行时,受到多种干扰条件的影响,比如海浪的起伏、海风和暗礁等,使得船舶的运动具有随机性和不确定性。
不论是早期的木船还是近现代大型远洋船舶,船舵始终决定了船舶的航行方向,是船舶上不可替代的组成部分。随着自动化程度的提高,自动舵系统逐渐应用于船舶航行控制系统中。装载自动舵系统的船舶,在航线线路的选择和航行耗能上与传统船舶相比具有明显优势,可以显著提高船舶的航行效率,提高船舶的经济性、可靠性。
传统的船舶航向控制技术在自适应控制上较落后,控制精度低,控制效果差。随着计算机技术和自动化技术的迅速发展,航向自适应控制技术也在不断的更新。本文利用反步法,对船舶航向控制系统进行改进和设计。
1 船舶航向控制系统的发展现状
船舶航向的控制为提高船舶在水中的稳定性,经历了随动舵到机械式自动舵的发展过程,机械自动舵的自适应能力差,航向参数的调节过程较麻烦。这主要是因为船舶在海域环境里航行时,外界环境参数不断发生变化,包括海浪的频率、海风的强度等。机械自动舵在进行参数调节时,对外界干扰的反应时间长,往往不能及时、有效的进行航向控制。
随着计算机技术在船舶航向控制中的应用,PID自动舵逐渐在大型船舶上装载。PID自动舵结合了控制理论的积分、微分算法,对航向偏差和增益的反应较灵敏,可以显著提高船舶的操作性能。但是,PID自动舵在极端天气下还存在着一些问题,当船舵发生大角度的偏转时,舵角会超过PID自动舵的调节范围,发生严重的事故。
随着现代控制理论的发展,一些优化算法和控制技术逐渐应用到船舶航向控制中。其中,反步法控制算法是一种逐步递推式的优化算法。反步法将整个航向控制系统分为几个不同的控制级别,每个控制级别又包含无数个子系统。从最低级别的子系统开始向高级别的系统计算,经过不断的递推和循环过程,实现船舶运动参数的调节。
2 基于反步法的航向自适应控制系统的研究
2.1 船舶航向自适应控制装置
船舶的结构和用途千差万别,不论是军事应用的舰艇还是工业运输船,其航向控制都是由舵机来实现的。船舶的舵机决定了船舶航行的线路选择和运动状态,是船舶至关重要的组成部分,而决定船舶舵机工作状态的则是自动舵控制系统。因此,自动舵控制系统对船舶意义重大。
船舶自适应控制装置的原理较简单,主要包括下列几个过程:
1)操作人员参考导航系统和实际海域环境,拟定船舶航向ψr。
2)船舶航向自适应装置接收到电罗经的实际航向信号ψ,与船舶拟定航向ψr进行比较,得到误差?ψ=ψr–ψ。
3)航向控制器系统将航向误差?ψ=ψr–ψ发送至船舶舵机,然后自动舵控制系统进行舵机的调整。这种调整是一个不断循环的过程,电罗经需要不断的采集船舶航行方向的信息,反馈到航向控制器系统中,误差?ψ=ψr–ψ也在不断变化。
4)当船舶航向误差?ψ=ψr–ψ趋近于0时,船舶实际航向与理论航行近乎一致。
航向自适应控制装置的工作原理如图1所示。
图1中,误差信号经过相敏整流器和放大器的作用,传输至船舶舵角控制器和船舵系统中。两者的误差?ψ=ψr–ψ调节是一个不断循环的过程。

图1 船舶航向自适应控制原理图
2.2 反步法自适应控制的发展
基于反步法的船舶航向控制技术,在航向自适应调节上具有诸多优点。该航向自适应控制的反应灵敏度高,功能稳定,且控制系统的结构简单。本文针对反步法航向自适应控制,对其原理和航向调节能力进行研究和仿真。
20世纪90年代初,Kanellakopoulos等学者率先提出了反步法。反步法是利用逐步递推方式,是一种针对参数反馈系统的优化算法。反步法的优化是层级递推式的,从系统的最后一级开始优化设计,使其稳定之后,递推到前一级进行稳定性设计,以此类推,直到完成整个系统的优化。反步法的优化过程如下所示:
首先,针对某一严格参数反馈的系统,将系统分为n个子系统如下式:
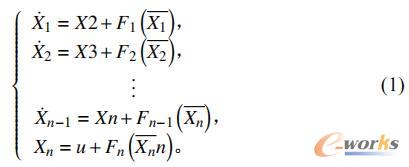
式中:X为系统的状态变量;u为系统的控制输入量;同时假定函数关系为标量函数,且F1(0)=0为系统的平衡点。
对初级状态变量X1选择正定函数如下式:
把X2视为X1子系统的控制变量,将X2视为X1的子系统虚拟控制,满足X2(0)=0,并引入新的虚拟控制Z2。
对子系统进行变换如下式:

构造其正定函数如下式:

按照反步法的递推关系可得一系列的虚拟控制如下式:

反步法的运算流程如图2所示。
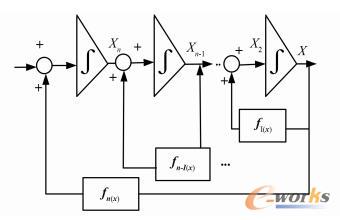
图2 反步法运算流程图
2.3 反步法航向自适应控制的仿真
判断某自动舵控制系统的好坏,可以根据以下两方面的性能:
1)自动舵控制系统的稳态特性,主要包括控制系统调节稳态误差的能力。稳态误差是指船舶在航行过程中,当航向保持不变时,控制系统的误差主要来自海域环境因素。自动舵的控制系统在稳态工作下主要任务就是减少这些环境扰动产生的稳态误差。
2)自动舵系统的动态特性。动态特性主要是指系统运行时的稳定性,调节船舶在改变航行线路时产生的动态误差的能力等。
在本文的研究中,利用反步法的船舶自适应航向控制系统可以从用层次递推的算法,最大程度的降低船舶航行的稳态误差和动态误差。为了更好的说明该船舶航向自适应控制,本文利用大型集装箱运输船的数学模型进行仿真实验。反步法航行自适应控制系统的仿真结构图如图3所示。
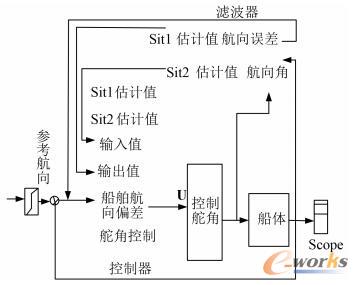
图3 反步法的航向自适应控制仿真图
3 结语
为了提高船舶操作性能,对船舶航向自适应装置进行大量研究。传统的自动舵航行控制系统存在精度低、反应迟钝和稳定性差等问题,本文在传统自动舵的基础上,结合反步法优化算法,对船舶航行自适应控制系统进行了设计和仿真。后期的实验和仿真说明,基于反步法的船舶航向控制系统具有灵敏度高、性能稳定和准确度高等优点,具有深远的理论和实际意义。
声明:本文来源于互联网,麦涛网本着传播知识、相互交流与学习的目的进行转载,并为网友免费提供。文章已尽力标明转载出处,如有著作权人或出版方提出异议,或有疑问,请随时联系(tel:0731-89579179,email:office@maitaonet.com)并告知我们,以便及时删除和纠正,谢谢。
来源:数字化企业网
